
Stereo Benchmark Overview
Varied datasets
- 13 / 12 DSLR datasets for training / testing.
- 5 / 5 multi-cam rig videos for training / testing.
- 27 / 20 frames for two-view stereo training / testing.

New challenges
- High-resolution (24 Mpx) DSLR images
- Multi-camera rig videos (4 cameras, ~13.6 Hz)

Rich visualizations
- 3D reconstruction visualization example
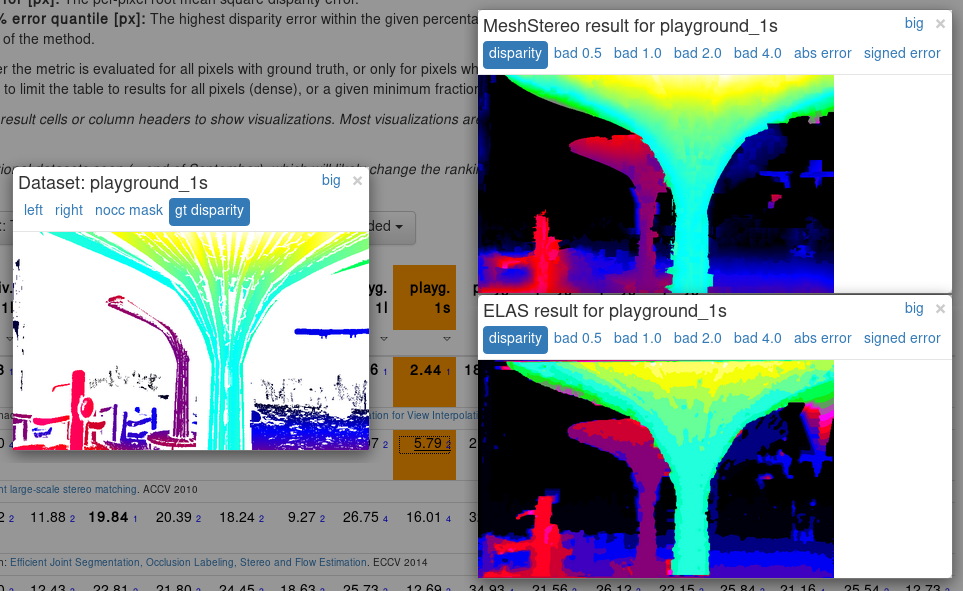
Use left mouse button to rotate, right to translate. May not work in mobile browsers. - Depth maps comparison example (screenshot).
{kind=link}
The multi-view stereo / 3D reconstruction benchmark covers a variety of indoor and outdoor scenes.
Ground truth geometry has been obtained using a high-precision laser scanner.
A DSLR camera as well as a synchronized multi-camera rig with varying field-of-view was used to capture images.
We offer the following challenges:
- 13 training and 12 test scenes (data / results) for high-resolution multi-view stereo with images recorded by the DSLR camera
- 5 training and 5 test videos (data / results) at ca. 13.6 Hz for low-resolution many-view stereo on video data recorded with the multi-camera rig
- 27 training and 20 test frames (data / results) for low-resolution two-view stereo on frames of the multi-camera rig
For a detailed description of the data and the format in which it is provided, see Documentation.
For downloading the datasets, go to Datasets.
Open source code related to the benchmark is available on GitHub.
This benchmark was a part of the Robust Vision Challenge 2018.